
Планиране на експеримента
Използва се "Диаграми и методи/Планиране на експеримента (DOE)" . Съществуващи методи:
Пълен факторен експеримент - всички възможни комбинации на зададен брой факторни нива
Дробни реплики - част от всички възможни комбинации при две нива на факторите
Композиционни - оптимални композиционни планове
Ротатабелни - ротатабелни композиционни планове
Случаен - случайни планове
LPTau - планове с равномерно разположени в пространството точки
D-оптимални - генерират се специално за модели на потребителя. Може да се използва предишен план и да се добавят D-оптимални точки.
Кръстосани - два плана се смесват така, че се получават всички комбинации на редовете им.
Ако е дефиниран модел, този инструмент може да чертае контури на дисперсията на предсказване за генерираните планове.
Обща процедура
1. Изберете метод за планиране на експеримента:
Пълен факторен експеримент - всички възможни комбинации на предварително определени факторни нива. Ако можем да си го позволим, това е най-скъпият план. Често води до голям брой експерименти.
Дробни реплики - използва подмножества на пълния факторен експеримент с две нива, които са подбрани така, че планът да остава ортогонален.
Композиционен - Използва пълен или дробен факторен експеримент с две нива и добавя централни и осеви ("звездни") точки.
Случаен - напълно случаен план
Ротатабелен - план, който осигурява еднакви стойности на дисперсията на предсказването на равни разстояния от центъра на плана.
LPTau - алгоритъм, запълващ пространството, който започва от центъра на факторното пространство и постепенно запълва цялото пространство, като започва от центъра на факторното пространство и постепенно запълва цялото пространство, така, че всяка нова точка се разполага колкото е възможно по-далече от съществуващите точки. Така се постигат добре равномерно разпределени точки. Планът може да се допълва (първите N експеримента винаги ще бъдат едни и същи). Затова този план е удобен за добавяне на нови експерименти към вече съществуващ план.
D-оптимален - този алгоритъм добавя нови редове към плана така, че детерминантата на информационната матрица да бъде максимална. Този план зависи от модела, като изисква дефиниране на структурата му. Засега се използва само за регресионни модели.
Кръстосан - Тези планове смесват два съществуващи плана, така че за всеки ред на план А използваме всички редове на план В. Така се получава план който има всички възможни комбинации на плановете А и В.
2. Задайте броя на променливите и максималния брой експерименти.
3. За получаване на дробен факторен или композиционен план са необходими за получаване на дробна реплика, оптимален композиционен или ротатабелен план:
Дробна реплика - каква част от пълния факторен експеримент трябва да се избере за получаване на желаната дробна реплика.
Куб повторения - използвани за композиционни планове - колко пъти да се повторят точките във върховете на куба.
Централни точки - броят на централните точки
Звездно рамо алфа - изчислява се автоматично, но може също да се измени ръчно и определя дължината на звездното рамо.
Повторение на звездните точки - колко пъти да се повторят звездните (осевите) точки.
4. Изберете структура на модела - това е необходимо за D-оптимални планове или в случай, че желаем контурни диаграми за дисперсията на който и да е план.
5. Може да се избере съществуващ план и да се използва като начален, след което да се добавят нови точки. Например, ако вече сте изпълнили определен брой експерименти и желаете да подобрите модела, можете да добавите няколко точки, избрани в съответствие с критерия D- оптималност.
6. За пълен и дробен факторни експерименти и композиционен планове трябва да се изберат нива, които са равни на стойности при които се изпълняват опитите.

7. Изберете бутона "Преглед" и кликнете "Старт", за да започнете генерирането.

На този етап може да се начертаят двумерни (2D) или тримерни (3D) графики представящи плана във факторното пространство. По долу е показана 3D графика:

Като се използва иконката
 може да се извърши рандомизация (въвеждане на
случаен ред при изпълняване на плана):
може да се извърши рандомизация (въвеждане на
случаен ред при изпълняване на плана):
С кликване върху бутона
 планът може да се пренесе в основната таблица
на продукта.
планът може да се пренесе в основната таблица
на продукта.
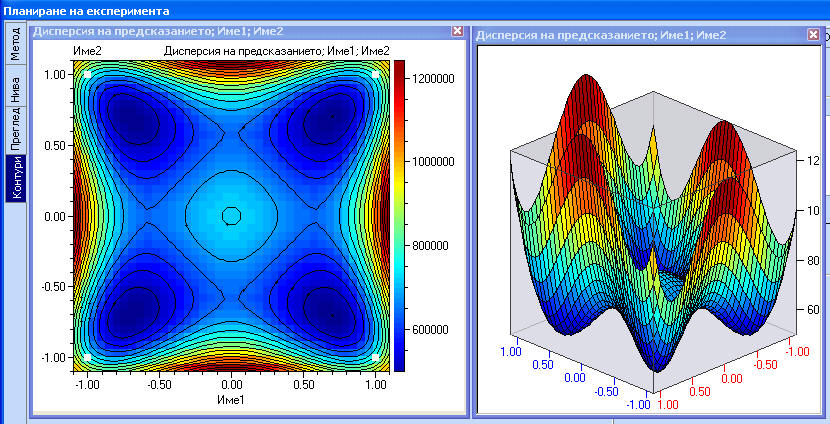
8. Ако е избрана структура на модела, можете да видите дисперсията на предсказанието. Области с висока стойност на дисперсията предполагат, че изучаваните планове дават по-малко информация в тази област.
При съставянето на дробни реплики с две нива на факторите може да се получи информация за системата на смесване на ефектите. На следващата графика е показана такава информация за 1/16 реплика при 7 фактора.

При последователно генериране на D-оптимални планове може да се проследи графично процеса на построяване на плана. По-долу е показано как се построява D-оптимален план с 12 опита за 2 фактора за пълен полином от втора степен:

Възможно е съставянето на пълен факторен експеримент с различен брой нива на факторите. По-долу е даден пример, при който първият фактор е с 4 нива, вторият - с 3 нива и третият - с 2 нива.

Следва пример за добавяне на точки към вече изпълнен план. Да предположим, че е съставен и изпълнен пълен факторен експеримент (ПФЕ) за 3 фактора с 8 опита. След провеждане на опитите полиномът от първи ред с взаимодействия се е оказал неадекватен. Искаме да допълним плана до такъв с 15 опита като използваме вече направените 8 опита с цел да съставим пълен полином от втори ред. Това може да стане с процедурата за последователно генериране на D-оптимални планове, като за начален план се приеме ПФЕ с 8 опита. Трябва да се има предвид, че за план от втори ред трябва да се зададат 3 нива на факторите. Началният план се записва в специално подготвената таблица (може с copy & paste):

Задават се 3 нива на факторите:

Задават се настройки за D-оптимален план и се задава структура на модел във вид на полином от втори ред:

Отива се на 'Преглед' и се натиска бутона 'Старт', при което се получава плана:
